Forscher schicken Mars-Roboter 250 Meter tief in die Zugspitze – Technik besteht Härtetest
Im Inneren der Zugspitze haben Forscher einen Mars-Roboter getestet, der selbst tief in einem Tunnel noch per Funk gesteuert werden konnte.

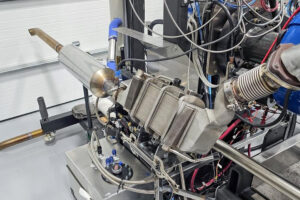
Der Mars-Roboter blieb selbst mehr als 250 Meter tief im Zugspitz-Tunnel per Funk erreichbar. Die Forscher testeten dort die Kommunikation wie bei künftigen Höhlenmissionen auf dem Mars. © Erlend Hellerslien / DLR
Wer auf dem Mars nach Spuren früheren Lebens sucht, muss vermutlich unter die Oberfläche. Höhlen könnten solche Spuren vor Strahlung, Kälte und starken Temperaturschwankungen schützen. Dort aber wird ein Rover schwer erreichbar: Fels blockiert Funksignale, Tunnel erschweren die Orientierung, jeder Befehl muss zuverlässig ankommen.
Auf der Zugspitze haben Forscher Julius-Maximilians-Universität Würzburg dieses Problem nun unter realistischen Bedingungen getestet. In einem Stollen am Schneefernerhaus erprobten sie eine Funkkette, mit der sich ein Rover auch tief im Berg steuern ließ.
Die Umgebung diente dabei als Pendant zur Mars-Landschaft. Die Ergebnisse sollen helfen, künftige Robotermissionen besser vorzubereiten.
Warum Höhlen für den Mars-Roboter so interessant sind
Als Testgelände nutzte das Team den sogenannten Kammstollen an der Nordseite der Zugspitze. Der Tunnel entstand bereits 1926. Früher liefen dort Wintersportler von der österreichischen Seilbahn zum deutschen Skigebiet. Heute gehört der Gang zum Schneefernerhaus, einer Forschungsstation auf knapp 2700 Metern Höhe.
Für Raumfahrtingenieure eignet sich der Stollen erstaunlich gut mit seinen engen Gängen und abgeschirmten Bereichen. Bedingungen wie diese gelten auch auf dem Mars als wahrscheinlich.
„Forscher gehen davon aus, dass mögliches Leben auf dem Mars eher unter der Oberfläche zu finden ist“, erklärt Raumfahrttechnik-Professor Hakan Kayal von der Universität Würzburg. Höhlen könnten dort Schutz vor starker Strahlung und extremen Temperaturen bieten.
Mars-Roboter blieb über 250 Meter erreichbar
Zum Einsatz kam der sogenannte Scout Rover des Deutschen Zentrums für Luft- und Raumfahrt. Entwickelt wurde das Fahrzeug am Institut für Robotik und Mechatronik in Oberpfaffenhofen. Die Daten mussten mehrere Stationen durchlaufen, bevor sie beim Rover ankamen. Der Weg sah so aus:
- Kontrollzentrum
- Satelliten-Nachbau im „Mars-Orbit“
- Gateway am Tunneleingang
- fünf Funk-Relais im Stollen
- Rover tief im Berg
Das System funktionierte ähnlich wie eine Kette von Funkstationen. Jede Einheit leitete das Signal an die nächste weiter. Auf diese Weise konnte das Team mehr als 250 Meter im Tunnel überbrücken.
Der Rover erhielt aus der Ferne Fahrbefehle und schickte Informationen zurück. Dazu gehörten Fotos der Umgebung, Laserscans und technische Messdaten. „Es ist uns gelungen, den Rover vollständig aus der Ferne zu steuern“, sagt Kayal.
Der Tunneltest lief wie eine echte Weltraummission ab
Die Forscher orientierten sich bei dem Versuch an realen Abläufen heutiger Raumfahrtmissionen. Befehle wurden nacheinander übertragen. Danach wartete das Team auf neue Daten des Roboters, bevor weitere Schritte folgten.
Im Tunnel bewegte sich der Rover nicht dauerhaft autonom. Die Wissenschaftler entschieden nach jeder Datenübertragung neu, wohin das Fahrzeug fahren sollte und welche Aufgaben es erledigt.
Für die Kommunikation griff das Team teilweise auf Erfahrungen der Würzburger Satellitenmission Sonate-2 zurück. Auch Technik der Berliner Firma IQ Spacecom kam zum Einsatz.
Nach Abschluss der Tests zogen die Entwickler eine positive Bilanz. „Der von uns durchgeführte Mars-Analogtest demonstriert eindrucksvoll, dass komplexe Kommunikations- und Explorationsszenarien auch unter extremen Bedingungen zuverlässig umgesetzt werden können“, heißt es vom Forschungsteam.
Auf der Zugspitze entsteht ein ungewöhnliches Mars-Labor
Das Schneefernerhaus hat sich in den vergangenen Jahren zu einem wichtigen Standort für Raumfahrtforschung entwickelt. Seit Januar 2024 nutzt auch die Universität Würzburg die Forschungsstation für ihre Arbeit. Für den Rover-Test zählt vor allem die besondere Lage: Der alte Stollen bietet abgeschirmte Bedingungen, bleibt aber für Forscher gut erreichbar.
Neben dem Rover-Test betreibt das Würzburger Team am Schneefernerhaus auch die Himmelskamera AllSkyCAM. Sie gehört nicht zum Rover selbst, prüft aber eine wichtige Voraussetzung für spätere Missionen: die stabile Übertragung großer Datenmengen. Solche Verbindungen braucht ein Mars-Roboter, wenn er später Bilder, Messdaten oder Laserscans aus einer Höhle zurücksenden soll.
Die AllSkyCAM ist Teil des Vorhabens „VaMEx3 – MarsSymphony“. Das Deutsche Zentrum für Luft- und Raumfahrt fördert dieses Vorhaben mit Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz. Die Kamera beobachtet Wolken, Meteore und andere Erscheinungen am Himmel. Für den Rover-Test ist aber vor allem ihre zweite Aufgabe relevant: Sie hilft dabei, die Kommunikationsstrecke zu einem simulierten Orbiter zu erproben.
Das Team untersucht mit der Kamera außerdem sogenannte „Unbekannte anomale Phänomene“, kurz UAPs. Gemeint sind Himmelserscheinungen, die sich zunächst nicht eindeutig einordnen lassen.
Warum unterirdische Marsmissionen immer wichtiger werden
Die Oberfläche des Mars gilt als extrem lebensfeindlich. Starke kosmische Strahlung trifft dort fast ungehindert auf den Boden. Dazu kommen starke Temperaturschwankungen und gewaltige Staubstürme.
Unterirdische Bereiche gelten deshalb als deutlich interessanter für künftige Missionen. Manche Wissenschaftler hoffen dort auf Spuren früher mikrobieller Organismen oder geschützte chemische Verbindungen.
Damit Roboter solche Regionen erforschen können, braucht es stabile Funktechnik und zuverlässige Navigation. Der Test auf der Zugspitze sollte genau solche Probleme unter realistischen Bedingungen nachstellen.
Die Ergebnisse liefern nun wichtige Daten dafür, wie sich ein Mars-Roboter auch tief unter der Oberfläche noch kontrollieren lässt.
Kurz zusammengefasst:
- Ein Forschungsteam der Universität Würzburg testete auf der Zugspitze einen Mars-Roboter unter Bedingungen, die Höhlen auf dem Mars ähneln. Der alte Tunnel im Berg diente als realistische Umgebung für Funk- und Navigationsprobleme.
- Der Rover blieb über eine Kette aus mehreren Funkstationen auch mehr als 250 Meter tief im Tunnel steuerbar. Dabei übertrug er Fotos, Laserscans und Messdaten an ein Kontrollzentrum zurück.
- Höhlen gelten auf dem Mars als besonders spannend, weil sie mögliche Spuren früheren Lebens vor Strahlung und extremen Temperaturen geschützt haben könnten. Deshalb arbeiten Forscher an Technik, mit der Roboter künftig auch unter der Marsoberfläche zuverlässig arbeiten können.
Übrigens: Nicht nur Funklöcher machen Mars-Robotern Probleme – oft scheitern sie schon am lockeren Sand. Forscher kopierten deshalb eine Sahara-Eidechse, die regelrecht durch Dünen „schwimmt“, und entwickelten daraus neue Räder für einen Marsrover. Mehr dazu in unserem Artikel.
Bild: © Erlend Hellerslien / DLR