Marsrover bleibt im Sand stecken – dann kopieren Forscher eine Sahara-Eidechse
Forscher aus Würzburg entwickeln einen Marsrover nach Vorbild einer Sahara-Eidechse, die sich schwimmend durch Sand bewegt.
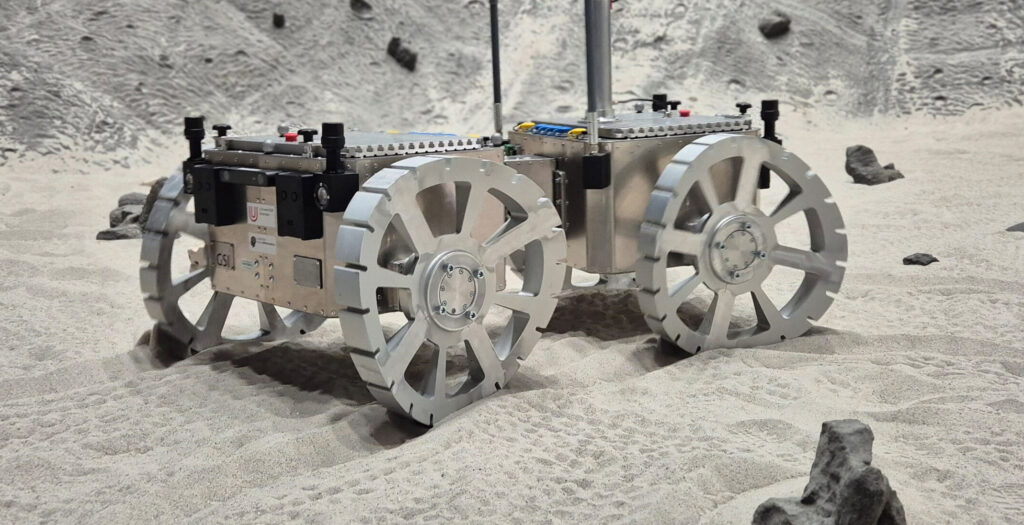
Der neue Marsrover nutzt spezielle Räder, die sich nach dem Vorbild einer Sahara-Eidechse durch lockeren Sand bewegen. © Marco Schmidt / Universität Würzburg
Auf dem Mars kann schon der Untergrund eine ganze Mission ausbremsen. Feiner Sand, loses Geröll und weiche Hänge machen Rover langsam und schwer steuerbar. Ihre Räder drehen durch, sinken ein oder verlieren Halt. Für eine Mission wird das schnell zum Problem, denn jeder Meter entscheidet darüber, welche Gesteine und Spuren ein Marsrover untersuchen kann.
Forscher der Universität Würzburg und aus Bremen setzen deshalb auf ein ungewöhnliches Vorbild. Der Sandfisch, eine kleine Eidechse aus der Sahara, bewegt sich nicht über den Sand hinweg. Er taucht in ihn ein und „schwimmt“ durch den lockeren Untergrund. Diese Bewegung soll nun einem neuen Marsrover helfen, schwieriges Gelände besser zu bewältigen.
Sahara-Eidechse inspiriert Marsrover
Der Sandfisch trägt den wissenschaftlichen Namen Scincus scincus. Die Eidechse lebt in trockenen Regionen der Sahara. Droht Gefahr, gräbt sie sich blitzschnell ein und bewegt sich unter der Oberfläche weiter. Dort „schwimmt“ sie regelrecht durch den Wüstensand.
Die Wissenschaft versteht erst seit wenigen Jahren genauer, wie sich der Sandfisch so gut durch Sand bewegen kann. Das Würzburger Team um Informatiker Marco Schmidt von der Professur für eingebettete Systeme und Sensoren für die Erdbeobachtung, kurz ESSEO, übertrug dieses Bewegungsprinzip nun auf einen Rover. Gemeinsam mit Partnern aus Bremen entwickelte die Gruppe spezielle Räder, die nicht einfach rollen.
Das Projekt gehört zur Initiative VaMEx des Deutschen Zentrums für Luft- und Raumfahrt. Beteiligt waren neben der Julius-Maximilians-Universität Würzburg auch die Universität Bremen und das Deutsche Forschungszentrum für Künstliche Intelligenz, kurz DFKI, in Bremen.

Warum herkömmliche Räder im Sand schnell versagen
Fahrzeuge auf dem Mars müssen mit sehr unterschiedlichen Böden umgehen. Dazu gehören:
- feiner Staub
- lockerer Untergrund
- Geröllfelder
- steile Hänge
- unebene Flächen
Normale Räder geraten dort schnell an Grenzen. Besonders weicher Boden macht Probleme. Fahrzeuge verlieren Haftung oder graben sich tiefer ein. Amenosis Lopez aus Schmidts Arbeitsgruppe erklärt: „Herkömmliche Radkonstruktionen sind oft für das Fahren bei niedrigen Geschwindigkeiten optimiert und neigen dazu, auf weichem Boden zu rutschen, einzusinken oder stecken zu bleiben“.
Die neue Konstruktion soll dieses Risiko verringern. Die Räder erzeugen zusätzliche Kräfte im Untergrund. Dadurch entsteht eine Bewegung, die eher an Schwimmen erinnert als an klassisches Fahren.
Marsrover hinterlässt Wellenmuster im Sand
Bei den Tests fiel vor allem das Spurenbild auf. „Die Räder imitieren die charakteristische Wechselwirkung des Tiers mit dem Boden, wobei sowohl Längs- als auch Querkräfte erzeugt werden“, sagt Lopez. Der Rover zog keine geraden Linien hinter sich her. „Der Rover hinterlässt im Sand sinusförmige Spuren – das bestätigt, dass der beabsichtigte Schwimmmechanismus erreicht ist“, erklärt der Forscher.
Für die Entwickler war das ein wichtiger Hinweis. Die Technik funktionierte also nicht nur theoretisch. Die Räder veränderten tatsächlich die Bewegung im lockeren Untergrund.
Erste Tests zeigen Vorteile – aber auch Schwächen
Die Gruppe um Schmidt testete den Rover auf Sandflächen und im Freiland. Nach Angaben der Entwickler bewegte sich das Fahrzeug stabil über lockeren Untergrund. Konkrete Zahlen zu Geschwindigkeit oder Energieverbrauch nennen die Wissenschaftler allerdings nicht.
Die ersten Versuche brachten außerdem technische Probleme ans Licht. Die ursprünglichen Räder waren schwerer und schmaler als pneumatische Vergleichsräder. Dadurch erhöhte sich der Druck auf den Boden. Der Rover sank stärker ein.
Hinzu kam ein weiteres Problem: Wenn die Räder auf dem weichen Untergrund keinen festen Halt fanden, sank der Rover stärker ein. Dadurch ließ er sich schlechter steuern. „Die Experimente haben uns auch klare Anhaltspunkte für Verbesserungen geliefert“, berichtet Schmidt.
Breitere Räder machen den Rover stabiler
Daraufhin änderte das Team das Design der Räder. Die Konstruktion wurde breiter und leichter. Dadurch sank der Druck auf den Boden. Auch das Einsinken verringerte sich. Die Forscher beobachteten mehrere Verbesserungen:
- weniger Schlupf
- stabilere Fortbewegung
- bessere Steuerbarkeit
Nach Einschätzung der Gruppe könnten weitere Anpassungen die Leistung zusätzlich steigern.
Software soll den Marsrover künftig absichern
Die Arbeit endet nicht bei der Hardware. Das ESSEO-Team aus Würzburg arbeitet bereits an neuen Steuerungssystemen. Der Rover soll künftig selbst erkennen, wann Untergrund problematisch wird.
Geplant sind Programme, die Rutschen, Einsinken und den Kontakt zwischen Rad und Boden laufend analysieren. Das Fahrzeug könnte seine Bewegung dadurch flexibler anpassen. Da Reparaturen auf dem Mars praktisch unmöglich sind, ist das ein wesentlicher Vorteil.
Der technische Ansatz könnte später auch auf der Erde interessant werden. Denkbar wären Einsätze in Wüstenregionen, Katastrophengebieten oder auf lockerem Untergrund, auf dem klassische Fahrzeuge Schwierigkeiten bekommen.
Kurz zusammengefasst:
- Forscher aus Würzburg und Bremen entwickelten einen Marsrover nach dem Vorbild des Sandfischs, einer Sahara-Eidechse, die sich durch lockeren Sand bewegt.
- Die neuartigen Räder rollen nicht nur über den Boden, sondern erzeugen zusätzliche Kräfte im Untergrund und sollen dadurch weniger leicht einsinken oder stecken bleiben.
- Erste Tests auf Sand zeigten eine stabilere Fortbewegung, zudem arbeiten die Teams bereits an Software, die den Rover automatisch an schwierigen Untergrund anpassen soll.
Übrigens: Während neue Marsrover künftig besser durch lockeren Sand kommen sollen, arbeiten Forscher schon am nächsten Schritt: Laufroboter könnten auf dem Mars selbstständig mehrere Gesteine hintereinander untersuchen und Missionen deutlich beschleunigen. In Tests erledigte ein halbautonomes System seine Aufgaben fast doppelt so schnell wie eine menschlich gesteuerte Mission. Mehr dazu in unserem Artikel.
Bild: © Marco Schmidt / Universität Würzburg