Münchner Tauchroboter räumt auf – KI holt Müll vom Meeresgrund
In einem EU-Projekt entwickelt die TU München einen smarten Tauchroboter, der Müll vom Meeresboden präzise bergen kann.
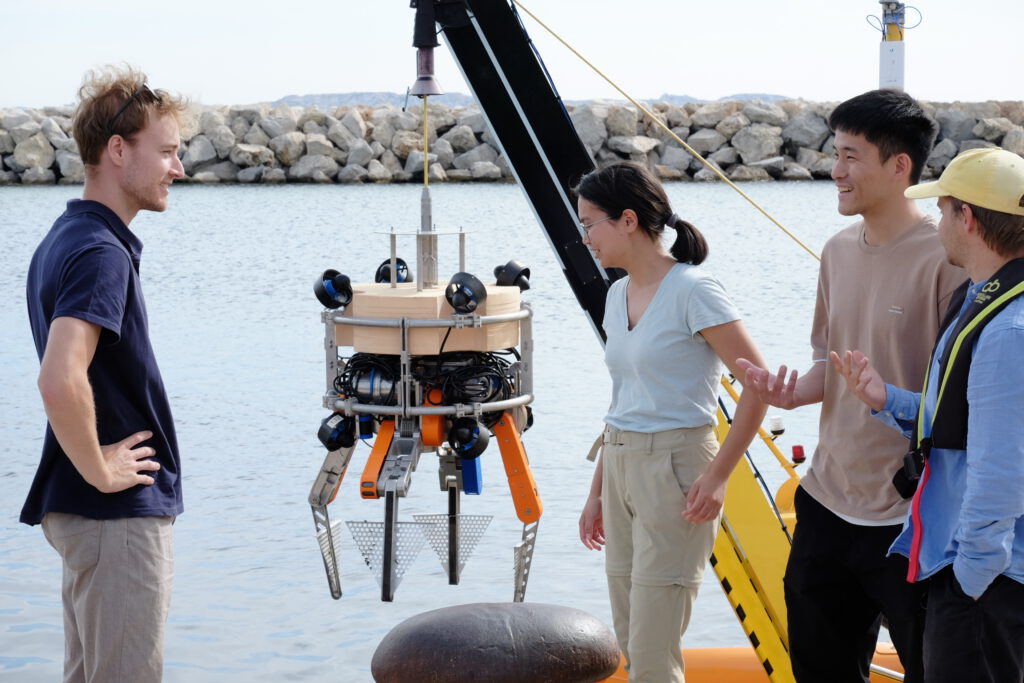
Die TUM-Forscher Nicolas Hoischen, Zara Zothabayeva, Tau-Yuan Huang und Hanisch Grant testen den Tauchroboter, der in Zukunft gezielt Müll vom Meeresboden entfernen soll. © Andreas Schmitz / TUM
Zersetzte Fischernetze, alte Reifen, Plastikflaschen oder sogar ganze E-Scooter – am Boden vieler Hafenbecken liegt eine vergessene, oft unsichtbare Last. Doch was dort still vor sich hin rostet und zerfällt, bedroht Meereslebewesen, verschmutzt Strände oder gelangt als Mikroplastik sogar in unsere Nahrung. Die Suche nach Lösungen wird drängender – und eine davon kommt jetzt aus Bayern: Ein Forschungsteam der Technischen Universität München (TUM)hat im Rahmen des EU-Projekts SEACLEAR einen Tauchroboter entwickelt, der speziell dafür gebaut wurde, Müll am Meeresgrund selbstständig zu erkennen, zu greifen und sicher zu bergen.
Hightech im Einsatz gegen Unterwassermüll
Das System besteht aus mehreren Komponenten, die zusammenspielen wie ein eingespieltes Team. Ein Serviceboot bleibt an der Oberfläche. Es liefert Strom und Datenverbindung über ein Kabel. Ein zusätzliches Beiboot nimmt den gesammelten Müll auf. Unterstützt wird das Ganze von einer Drohne und einem kleinen Suchroboter, der den Meeresboden mit Sonartechnik abscannt.
Das Herzstück des Systems ist ein rund ein Kubikmeter großer Tauchroboter. Angetrieben von acht Mini-Turbinen, bewegt er sich frei unter Wasser und kann gezielt zu Müllstellen navigieren. Möglich machen das eine Kamera und ein Sonar, mit dem der Roboter auch in trüben Gewässern die Orientierung behält.
Dr. Stefan Sosnowski von der TU München erklärt: „Da wir den Müll zunächst identifizieren müssen und das Greifen von Objekten eine hohe Präzision erfordert, haben wir eine Kamera und ein Sonar an Bord, das die Orientierung selbst in trübem Wasser ermöglicht.“

Präzise KI erkennt, was nicht auf den Meeresgrund gehört
Damit der Tauchroboter Müll sicher greifen kann, muss er zunächst genau verstehen, was er da überhaupt sieht. Ein neuronales Netz wertet die Aufnahmen aus und verwandelt sie in ein 3D-Modell. So erkennt die Technik, wo ein Objekt stabil angefasst werden kann – ob es sich nun um eine Glasflasche, ein altes Seil oder einen Fahrradrahmen handelt.
Ein Problem: Es gibt bislang kaum Unterwasserbildmaterial, mit dem sich die KI trainieren lässt. Also mussten die Forscher selbst nachhelfen. „Deswegen haben die Projektpartner bisher über 7.000 Bilder gelabelt – also als Objekte gekennzeichnet, die nicht auf den Meeresgrund gehören“, so Sosnowski.
Der Greifarm denkt mit – und schützt, was er packt
Der Roboterarm des Münchner Tauchsystems kann mit bis zu 4.000 Newton zupacken. Das reicht locker für schwere Autoteile. Gleichzeitig registrieren spezielle Sensoren, wie viel Druck ein Objekt verträgt. Eine zerbrechliche Plastikflasche wird also anders behandelt als ein massiver Reifen.
„Das ist wichtig, um zu entscheiden, wo das Objekt stabil gegriffen werden kann“, sagt Sosnowski. Die geborgenen Teile werden über eine Seilwinde an die Oberfläche gezogen – direkt ins wartende Beiboot, das als schwimmender Müllcontainer dient.

Ab 16 Metern Tiefe lohnt sich der Einsatz besonders
Laut TUM lässt sich die Müllbeseitigung mit dem System wirtschaftlich sinnvoll betreiben – sobald das Wasser tief genug ist. Ab etwa 16 Metern beginnt sich der Aufwand zu lohnen. In vielen europäischen Hafenbecken ist das Standard.
Besonders für Städte oder Hafenbetreiber könnte das System eine echte Alternative sein. Denn Taucheinsätze sind teuer, gefährlich und wetterabhängig. Ein automatisiertes Reinigungssystem könnte regelmäßig zum Einsatz kommen – ganz ohne Risiko für Menschen.
Das Projekt aus München zeigt, wie technischer Fortschritt ganz konkrete Umweltprobleme lösen kann. Und zwar mit nachhaltigem Effekt. Denn neben der offensichtlichen Sauberkeit an Häfen und Küsten geht es auch um langfristige Verbesserungen für die Lebensqualität in vielen Regionen.
Europa könnte Vorreiter bei smarter Meeresreinigung werden
Noch befindet sich das System in der Erprobung. In Marseille lief bereits eine erfolgreiche Demonstration: Der Tauchroboter barg unter anderem Müll wie einen Autositz und einen Reifen. Unterstützt wird das Projekt von mehreren Partnern, etwa aus Deutschland, den Niederlanden, Kroatien und Frankreich.
Der nächste Schritt könnte sein, die Technologie auch in größeren Küstenstädten einzusetzen – von Hamburg über Genua bis Rotterdam. Denn das Problem betrifft längst nicht nur den Mittelmeerraum.
Kurz zusammengefasst:
- Ein neuer Tauchroboter aus München kann Müll am Meeresgrund erkennen, gezielt greifen und selbstständig bergen – auch bei trübem Wasser.
- Das System arbeitet wirtschaftlich ab 16 Metern Tiefe, ersetzt gefährliche Taucheinsätze und schützt gleichzeitig Meeresbewohner vor Plastik, Netzen und Metallschrott.
- Mithilfe künstlicher Intelligenz analysiert der Roboter über 7.000 gelernte Bildmuster, entscheidet sensibel über den Griffpunkt und transportiert den Müll in ein schwimmendes Beiboot.
Übrigens: Neue KI-Werkzeuge wie ProRNA3D-single zeigen erstmals in 3D, wie Viren und Alzheimer-Moleküle im Körper angreifen. Damit könnten Forscher Medikamente deutlich gezielter entwickeln – mehr dazu in unserem Artikel.
Bild: © Andreas Schmitz / TUM











1 Gedanken zu „Münchner Tauchroboter räumt auf – KI holt Müll vom Meeresgrund“