Eiskaltes Roboter-Händchen – Abnehmbare Hand macht sich selbstständig
Forschende entwickeln eine autonome Roboterhand, die sich vom Arm löst, eigenständig bewegt und Werkzeuge aus engen Zwischenräumen holt.
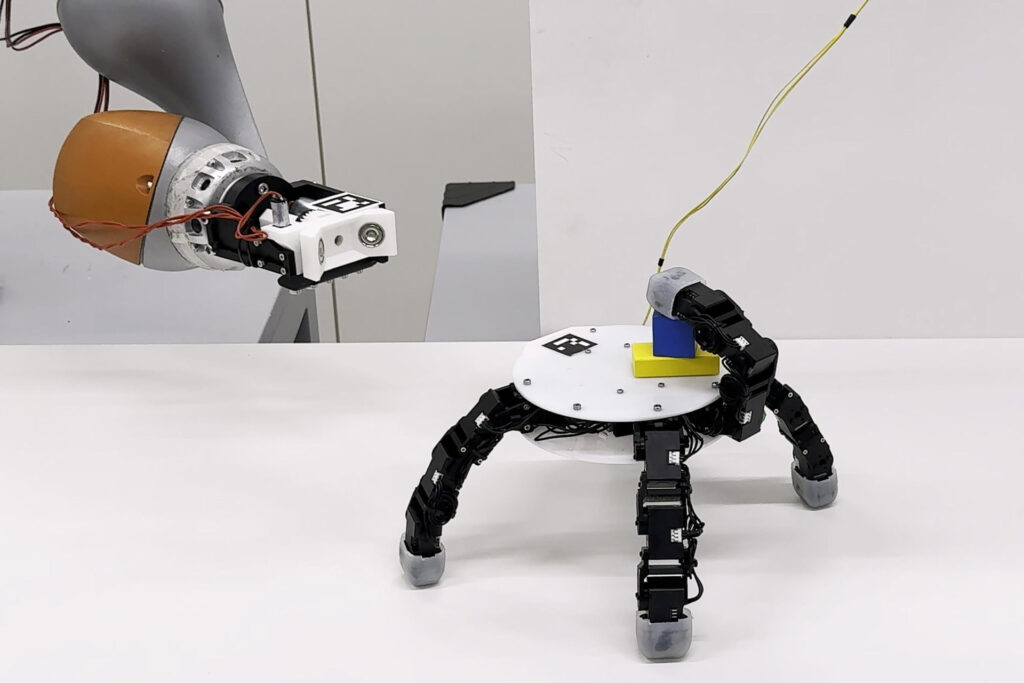
Die abnehmbare Roboterhand bewegt sich selbstständig durch enge Bereiche und unterstützt Maschinen dort, wo der Roboterarm nicht mehr weiterkommt. © Xiao Gao
In Produktionshallen und Werkstätten reicht oft eine Handbreit, um große Probleme zu verursachen. Rutscht ein Werkzeug hinter eine Abdeckung oder klemmt ein Bauteil in einem schmalen Spalt, steht selbst der modernste Roboter still.
Hier kommt eine Idee ins Spiel, die an die Addams Family erinnert, wo das „Eiskalte Händchen“ Aufgaben auf eigene Faust übernimmt. Eine autonome Roboterhand trennt sich bei Bedarf vom Arm, bewegt sich eigenständig weiter und erledigt Aufgaben dort, wo klassische Systeme an ihre Grenzen stoßen.
Die autonome Roboterhand setzt auf Symmetrie statt Daumen
Entwickelt wurde das System von Forschenden der EPFL in Lausanne gemeinsam mit der Universität Wuhan. Die Konstruktion bricht bewusst mit dem Vorbild der menschlichen Hand. Statt Daumen und Finger mit festen Aufgaben gibt es fünf identische Finger. Jeder kann sich in beide Richtungen biegen und jedem anderen gegenüberstehen.
Diese Symmetrie macht die Hand vielseitiger. Greifen funktioniert nicht nur von vorne, sondern auch von der Rückseite. Objekte lassen sich auf der Innenfläche halten oder auf dem Handrücken ablegen. Mehrere Gegenstände können gleichzeitig transportiert werden. Ein klassisches Handgelenk fehlt, Drehbewegungen entfallen. Entscheidend ist allein, wie die Finger zusammenspielen.
„Unser System ist für praktische Aufgaben gedacht, etwa Inspektionen oder das Bergen von Objekten in Rohren oder Maschinen. Ziel ist es, die Fähigkeiten über die menschliche Hand hinaus zu erweitern“, erklärt Erstautor Xiao Gao.
Vom Greifer zum mobilen Werkzeug
Im Normalbetrieb sitzt die Hand fest am Roboterarm. Sie greift, hält und bewegt Objekte wie ein klassisches Werkzeug. Reicht der Bewegungsradius nicht mehr aus, kommt der besondere Mechanismus zum Einsatz. Ein motorisch gesteuertes System löst die Verbindung. Magnete sorgen später dafür, dass sich die Hand präzise wieder andocken lässt.
Am Boden übernehmen die Finger neue Rollen. Einige stützen den Körper, andere greifen. So kann die Hand krabbeln und sich wie ein kleines, mobiles Werkzeug fortbewegen. In Versuchen transportierte sie mehrere Gegenstände gleichzeitig und bewegte sich dabei stabil weiter. Selbst nach einem Umkippen richtet sie sich wieder auf. Die symmetrische Bauweise erlaubt Bewegung in jeder Lage.
Die Forschenden testeten mit Algorithmen tausende Varianten von Fingerzahl, Länge und Anordnung. Übrig blieb eine Form, die Greifen und Fortbewegung zuverlässig verbindet und dabei möglichst einfach bleibt.
Präzise Hilfe dort, wo Platz fehlt
In Industrieanlagen gelangt die Hand in Bereiche hinter Maschinenverkleidungen oder tief in Rohrsysteme. Auch zwischen dicht gestellten Regalen in Lagern bleibt sie beweglich. Bei Wartungsarbeiten holt sie Bauteile zurück, die sonst ganze Anlagen zum Stillstand bringen könnten.
Darüber hinaus übernimmt sie Tätigkeiten, für die Menschen normalerweise beide Hände brauchen, wie etwa das gleichzeitige Halten eines Werkzeugs und des Werkstücks oder das Aufdrehen eines Verschlusses.
Mehr Beweglichkeit, aber keine Alleskönner
Die abnehmbare Einheit ersetzt keine bestehenden Roboter, sie ergänzt sie. Der Hauptarm übernimmt grobe Arbeiten, die mobile Hand kümmert sich um Details.
Digby Chappell vom Oxford Robotics Institute nennt die Entwicklung laut Financial Times „unterhaltsam und provokant“. Zugleich hebt er den praktischen Wert hervor: „Roboter, die sich bewegen, greifen und mit ihrer Umgebung interagieren können, bieten viel Nutzen.“
Grenzen bleiben dennoch. Die Finger erreichen nicht die Greifkraft spezialisierter Industriegreifer. Auch die Einsatzdauer ist im abgekoppelten Betrieb begrenzt. Geschwindigkeit spielt dabei keine Rolle. Der Mehrwert liegt in der Beweglichkeit in engen, bislang unerreichbaren Bereichen.
Kurz zusammengefasst:
- Eine autonome Roboterhand kann sich vom Arm lösen, selbstständig krabbeln und Objekte bergen, wodurch Reichweitenprobleme klassischer Roboter in engen oder schwer zugänglichen Bereichen gelöst werden.
- Statt menschlicher Anatomie nutzt die Hand fünf identische, beidseitig bewegliche Finger; Symmetrie ermöglicht Greifen, Tragen und Fortbewegung zugleich, auch mit mehreren Objekten.
- Entwickelt von EPFL Lausanne und der Universität Wuhan, eignet sich das System besonders für Wartung, Industrie und Logistik, ergänzt bestehende Roboter und arbeitet dort weiter, wo Menschen oder starre Maschinen an Grenzen stoßen.
Übrigens: Auf der ISS übernimmt inzwischen ein kleiner Roboter immer mehr Routinearbeit und bewegt sich dank KI erstmals völlig selbstständig durch die Module. Wie Astrobee ohne ständige Steuerung von der Erde navigiert und warum das den Alltag der Astronauten verändert, mehr dazu in unserem Artikel.
Bild: © Xiao Gao / EPFL











1 Gedanken zu „Eiskaltes Roboter-Händchen – Abnehmbare Hand macht sich selbstständig“