Kleiner als ein Salzkorn: Autonome Mikroroboter überwinden 40 Jahre alte Grenze der Robotik
Autonome Mikroroboter arbeiten erstmals selbstständig im Submillimeterbereich. Möglich wird das durch neue Ansätze bei Bewegung, Energie und Steuerung.
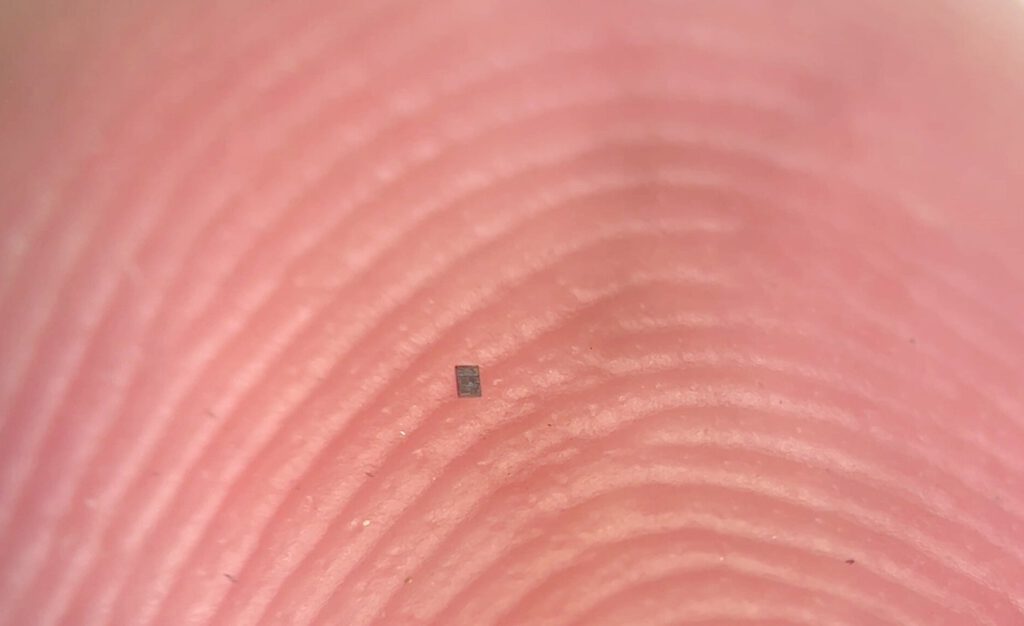
Ein autonomer Mikroroboter mit Sensoren und Rechner balanciert auf der feinen Linie eines Fingerabdrucks. © Marc Miskin, Penn
Seit fast vier Jahrzehnten stößt die Robotik an dieselbe Grenze. Maschinen lassen sich immer weiter verkleinern, verlieren aber unterhalb eines Millimeters ihre Selbstständigkeit. Für Messungen, Steuerung und Entscheidungen braucht es bislang externe Technik – vom Laboraufbau bis zum Steuerrechner. Gerade für medizinische oder biologische Anwendungen war das ein zentrales Hindernis.
Forscher der University of Pennsylvania und der University of Michigan haben diese Grenze nun verschoben. Sie entwickelten autonome Mikroroboter, kleiner als ein Salzkorn, die ihre Umgebung selbst erfassen, einfache Entscheidungen treffen und ihr Verhalten anpassen. Der entscheidende Fortschritt liegt dabei nicht in mehr Rechenleistung, sondern in einem neuen Verständnis von Bewegung, Energie und Steuerung im Mikromaßstab, heißt es in ihrer Studie.
Auf dieser Größenskala gelten andere Regeln als im Alltag. Trägheit verliert an Bedeutung, Reibung und Zähflüssigkeit bestimmen das Geschehen. Wasser verhält sich eher wie Sirup. Bewegliche Beine oder Greifer stoßen schnell an Grenzen. Genau an diesem Punkt setzt die neue Technologie an.
Warum autonome Mikroroboter so lange scheiterten
Knapp 40 Jahre blieb die Robotik an dieser Hürde hängen. Sensoren und Schaltkreise schrumpften stetig. Doch autonome Roboter mit Rechenlogik, Speicher und eigenem Antrieb blieben größer als ein Millimeter. Frühere Mikroroboter brauchten Magnetfelder, Ultraschall oder aufwendige Laboraufbauten. Entscheidungen fielen außerhalb des Roboters.
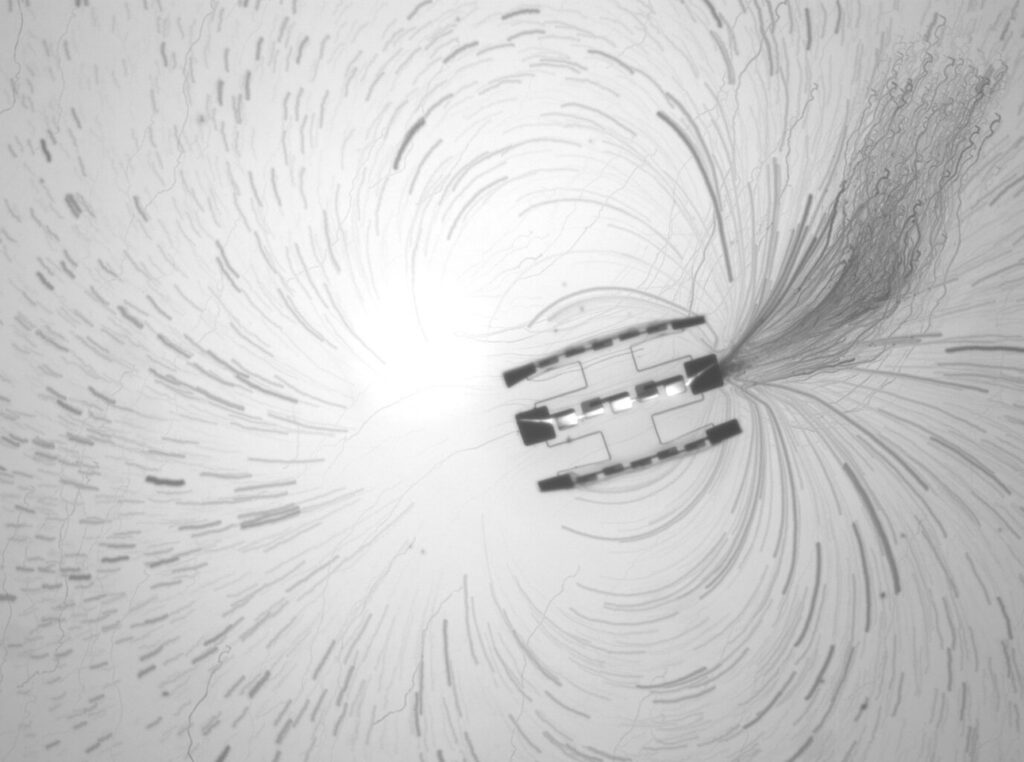
Die neuen Modelle gehen bewusst einen anderen Weg. Sie verzichten auf bewegliche Teile. Stattdessen erzeugen sie elektrische Felder, die geladene Teilchen im Wasser bewegen. Die entstehenden Strömungen treiben den Roboter an. Das Prinzip ist robust und passt zur Welt auf Zellgröße.
Bewegung ohne Beine – und trotzdem kontrolliert
Die Fortbewegung ähnelt keiner bekannten Maschine. Elektroden am Körper legen ein Feld an. Ionen ziehen Wasser mit sich. Der Roboter schwimmt mit. Durch gezieltes Umschalten der Felder entstehen Drehungen, Bögen oder Geradeausbewegungen. Die Geschwindigkeit liegt bei wenigen Mikrometern pro Sekunde, reicht aber für präzise Manöver.
Ein Vorteil liegt in der Konstruktion. Die Elektroden besitzen keine beweglichen Teile. Das erhöht die Haltbarkeit deutlich. Die Roboter überstehen monatelangen Betrieb in Flüssigkeiten. Sie lassen sich mit einer Pipette umsetzen, ohne Schaden zu nehmen. Für Versuche im Labor ist das entscheidend.
Ein Computer auf weniger als einem Millimeter
Erstmals arbeitet in einem so kleinen Roboter ein vollständiger Rechner. Prozessor, Speicher, Sensoren und Energieversorgung sitzen auf einem einzigen Chip. Die Energie liefern winzige Solarzellen. Eine einfache LED genügt, um den Roboter zu betreiben und zu programmieren.
Der Stromverbrauch liegt bei rund 100 Nanowatt. Zum Vergleich: Eine Smartwatch benötigt mehr als hunderttausendmal so viel Leistung. Möglich wird das durch sehr einfache Schaltkreise und extrem niedrige Betriebsspannungen.
Messen, entscheiden, reagieren – ganz ohne Funk
Die Roboter besitzen Temperatursensoren mit einer Auflösung von etwa 0,3 Grad Celsius. Das genügt, um Veränderungen auf Zellebene zu erfassen. Messwerte lassen sich speichern, vergleichen und für Verhaltensänderungen nutzen.
Ihre Ergebnisse senden die Roboter nicht per Funk. Stattdessen übertragen sie Informationen über Bewegung. Bestimmte Muster codieren Zahlen. Eine Kamera liest diese Bewegungen aus. Die Forscher vergleichen das Prinzip mit dem Schwänzeltanz von Honigbienen.
Programme per Licht, Aufgaben im Team
Jeder Roboter erhält seine Befehle über Lichtsignale. Kurze Impulse schreiben Programme direkt in den Speicher. Jeder Chip besitzt eine eigene Adresse. So lassen sich Gruppen gezielt steuern. Ein Roboter misst, ein anderer bewegt sich, ein dritter meldet Daten zurück.
„Wir haben autonome Roboter 10.000-mal kleiner gemacht“, sagt Projektleiter Marc Miskin. „Das eröffnet eine völlig neue Größenordnung für programmierbare Maschinen.“ Die Arbeit entstand gemeinsam mit dem Team um David Blaauw, bekannt für besonders stromsparende Minicomputer.
Ein wichtiger Punkt ist die Herstellung. Die Roboter entstehen mit gängigen Verfahren der Halbleiterindustrie. Auf einem Chip sitzen Dutzende Exemplare. Mit steigenden Stückzahlen sinken die Kosten deutlich. Perspektivisch liegen sie bei wenigen Cent pro Roboter.
Wo autonome Mikroroboter künftig helfen könnten
Autonome Mikroroboter sind für Umgebungen gedacht, die für klassische Technik kaum zugänglich sind. Aufgrund ihrer Größe bewegen sie sich durch enge Kanäle, Mikroreaktoren oder Zellkulturen. Dort können sie Temperaturverläufe erfassen, ohne Gewebe zu berühren, und Veränderungen direkt vor Ort registrieren.
Auch für gezielte Therapien ergeben sich neue Optionen. Wirkstoffe ließen sich lokal freisetzen, ausgelöst durch Messwerte im unmittelbaren Umfeld. In der Mikrofertigung könnten Schwärme winziger Maschinen Bauteile prüfen oder Abläufe überwachen. Da die Roboter programmierbar bleiben, lassen sich ihre Aufgaben selbst nach der Herstellung anpassen.
Ein Fundament für die nächste Entwicklungsstufe
Noch sind die Programme einfach. Der Speicher umfasst nur wenige Hundert Bits. Die Architektur erlaubt jedoch Wachstum. Neuere Fertigungsprozesse könnten den Speicher deutlich erweitern. Auch höhere Geschwindigkeiten sind möglich, etwa durch optimierte Schaltkreise.
„Das ist erst der Anfang“, sagt Miskin. „Wir haben gezeigt, dass man Gehirn, Sensor und Antrieb in etwas packen kann, das fast unsichtbar ist – und monatelang funktioniert.“
Kurz zusammengefasst:
- Autonome Mikroroboter scheiterten jahrzehntelang an der Physik im Mikromaßstab, nicht an fehlender Elektronik: Unterhalb eines Millimeters dominieren Reibung und Zähflüssigkeit, klassische Antriebe versagen dort.
- Der Durchbruch gelang durch einen Strategiewechsel: Statt beweglicher Teile nutzen die Roboter elektrisch erzeugte Strömungen, tragen Rechner, Sensoren und Speicher an Bord und kommen mit extrem wenig Energie aus.
- Erstmals arbeiten Roboter in dieser Größe monatelang selbstständig, messen ihre Umgebung, treffen einfache Entscheidungen und übermitteln Daten – eine Grundlage für Anwendungen in Medizin, Biologie und Mikrofertigung.
Übrigens: Während autonome Mikroroboter im Labor erstmals selbstständig denken und handeln, bringen andere winzige Maschinen Medikamente schon heute gezielt zu Blutgerinnseln oder Tumoren. Wie solche Mikroroboter Nebenwirkungen reduzieren und Therapien präziser machen könnten, mehr dazu in unserem Artikel.
Bild: © Marc Miskin, Penn











4 Gedanken zu „Kleiner als ein Salzkorn: Autonome Mikroroboter überwinden 40 Jahre alte Grenze der Robotik“