Soft-Roboter aus Stuttgart: Neue Katheter machen Herz-OPs sicherer
Forscher des Max-Planck-Instituts entwickeln Soft-Roboter, die ihre Form ändern und Katheter für Gefäßeingriffe sicherer machen.
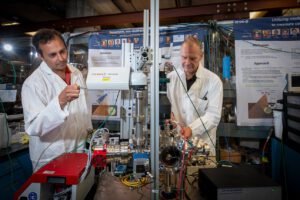
Fan Wang, Xianqiang Bao und Jianhua Zhang präsentieren die neue Soft-Roboter-Technologie, mit der sich Strukturen in Echtzeit verformen lassen. © MPI
Es ist eine der heikelsten Situationen im Operationssaal: Ein Katheter wird durch enge, verwundbare Blutgefäße geschoben, um das Herz zu erreichen. Jeder Millimeter entscheidet, ob das Gewebe unversehrt bleibt – oder ob es zu gefährlichen Verletzungen kommt. Für ältere oder geschwächte Patienten ist dieses Risiko oft zu hoch, manche Eingriffe gelten deshalb als kaum durchführbar. In Stuttgart wurde nun eine Technik entwickelt, die Hoffnung macht: Soft-Roboter aus dem Max-Planck-Institut passen sich den Gefäßen an und könnten Eingriffe für Herzpatienten erstmals wirklich sicher machen.
Wie sich die Soft-Roboter-Katheter selbst anpassen
Das Besondere: Die Katheter bestehen aus flexiblen Röhren, die ineinandergeschoben sind – ähnlich wie Matroschka-Puppen. Im Inneren sitzen magnetische Einheiten, die sich gegeneinander verschieben lassen. Dadurch verändert sich das Bewegungsmuster sofort, ohne dass das äußere Magnetfeld neu eingestellt werden muss.
Die Folge: Die Roboter passen sich beim Vorschieben automatisch an die Form der Gefäße an und gleiten nahezu kontaktfrei durch enge und gekrümmte Abschnitte. „Die ineinander gestapelten Schläuche könnten der Anstoß zu einer neuen Katheter-Technologie sein“, sagt Metin Sitti, Direktor am Max-Planck-Institut.
In Modellen von Blutgefäßen und in Versuchen an Schweineherzen gelang es bereits, die Katheter sicher und ohne Reibung durch schwierige Abschnitte zu steuern. Für Herzpatienten wäre das ein echter Fortschritt.

Längere, präzisere Eingriffe werden möglich
Nach Angaben der Forscher lassen sich Katheter mit einer Länge von 305 Millimetern mehrfach biegen und gezielt kontrollieren. Mit handelsüblichen Varianten wurde sogar eine Steuerbarkeit bis zu 1,24 Metern erreicht. Damit könnten in Zukunft Regionen im Körper erreicht werden, die bisher als kaum zugänglich galten.
Für Patienten bedeutet das:
- weniger Verletzungsgefahr an empfindlichen Gefäßwänden
- kürzere Heilungszeiten durch schonendere Eingriffe
- neue Chancen für Menschen, die bislang nur Medikamente erhielten, weil ein Katheter zu riskant war
Wenn Roboter stillstehen
Eine überraschende Eigenschaft entdeckte das Team während der Entwicklung: Treffen zwei gleich starke, aber entgegengesetzt ausgerichtete magnetische Einheiten aufeinander, heben sie sich gegenseitig auf. Der Roboter bleibt bewegungslos, obwohl das Magnetfeld weiter wirkt. „Während der Forschung entdeckten wir unerwartete Fähigkeiten wie Formbeständigkeit und magnetische Neutralisierung“, fasst Erstautor Xianqiang Bao zusammen.
Damit lässt sich ein einzelner Roboter im Magnetfeld ausschalten, während ein anderer weiterarbeitet – ein Vorteil, wenn mehrere Instrumente gleichzeitig im Körper aktiv sind.
Mehrere Katheter parallel steuern
Genau das ist bei vielen Eingriffen entscheidend. Oft reicht ein Instrument nicht aus. Mit der neuen Technik können zwei Katheter unabhängig voneinander im gleichen Magnetfeld gesteuert werden. So ließe sich beispielsweise ein Gefäß freiräumen, während parallel Medikamente verabreicht oder Kontrastmittel eingesetzt werden.
Zilien-Arrays bewegen Flüssigkeiten
Neben Kathetern entwickelten die Forscher auch winzige Zilien-Arrays. Sie erinnern an die Flimmerhärchen im menschlichen Körper, die Flüssigkeiten transportieren – etwa in den Atemwegen, wo sie Schleim und Staubpartikel abführen. Diese künstlichen Zilien lassen sich einzeln ansteuern, verstärken oder phasenverschoben einsetzen.
In einem Versuch konnten Flüssigkeiten in einem zähen Medium aus 85 Prozent Glycerin gezielt in verschiedene Richtungen bewegt werden. Das eröffnet neue Möglichkeiten für die gezielte Verteilung von Medikamenten oder Kontrastmitteln.
Greifer für empfindliche Bauteile
Auch außerhalb der Medizin hat die Entwicklung Potenzial. Die Forscher bauten Greifer mit fünf Fingern, die sich unabhängig voneinander bewegen. Bei einem Magnetfeld von 35 Millitesla reagierten die Finger flexibel. Bei 60 Millitesla konnten zwei Greifer gemeinsam Objekte in T-, F- oder n-Form fassen. Damit könnten Soft-Greifer künftig empfindliche Bauteile in der Industrie handhaben.
Noch gibt es Einschränkungen. Die Steuerung hängt stark von den verwendeten Materialien ab. Kleinere magnetische Einheiten erhöhen die Präzision, sind jedoch schwieriger herzustellen. Bei Durchmessern unter einem Millimeter stößt das Verfahren an technische Grenzen, weil die Beschichtung der Röhren nicht mehr zuverlässig funktioniert.
„Unser ursprüngliches Ziel war es, eine Methode zu entwickeln, mit der sich ein Magnetisierungsprofil umgehend und in situ verändern lässt“, sagt Bao. Künftig soll erforscht werden, wie sich die Technik sowohl in der Medizin als auch in industriellen Prozessen einsetzen lässt.
Kurz zusammengefasst:
- Soft-Roboter-Katheter aus dem Max-Planck-Institut passen sich flexibel den Blutgefäßen an und verringern das Risiko von Verletzungen.
- Erste Tests zeigen, dass Eingriffe dadurch auch bei älteren oder geschwächten Patienten sicherer möglich werden.
- Neben Kathetern könnten auch Zilien-Arrays und Soft-Greifer neue Anwendungen in Medizin und Industrie finden.
Übrigens: Winzige Roboter, kaum größer als ein Sandkorn, können künftig wie ein intelligenter Schwarm agieren und dabei sogar eigenständig kommunizieren. Welche Chancen das für Medizin, Umwelt und Industrie bietet – mehr dazu in unserem Artikel.
Bild: © MPI